- >Accurate and low latency attitude estimation is critical for stable flight of the flapping-wing platform. We implemented a quaternion-based Madgwick filter (80) on the ESP32-S3 (dual-core 240 MHz with floating-point unit) to fuse IMU measurements in real time. This approach was selected for its low computational cost, fast convergence, and robustness under dynamic motion, outperforming complementary filters in accuracy and avoiding the high complexity and matrix operations of extended Kalman filters.
Bravo, quaternion is the (only) way to go, the sooner UAV/UAS system designer realize this the better.
- Interesting, can you explain why?
- You can chain normalized quaternions to combine or diff transformations. For example you can subtract desired attitude quaternion from predicted attitude quaternion to get attitude error quaternion which you can then feed to control algs designed for driving that error to zero. This is even more important when multiple frames of reference are involved as quaternions can be used to transform between them.
- Visualized: https://commons.wikimedia.org/wiki/File:Quaternion_2.svg
Quaternions and 3D Geometry: https://en.wikipedia.org/wiki/Quaternion#Quaternions_and_thr...
- Not a single decent photo of the butterfly robot
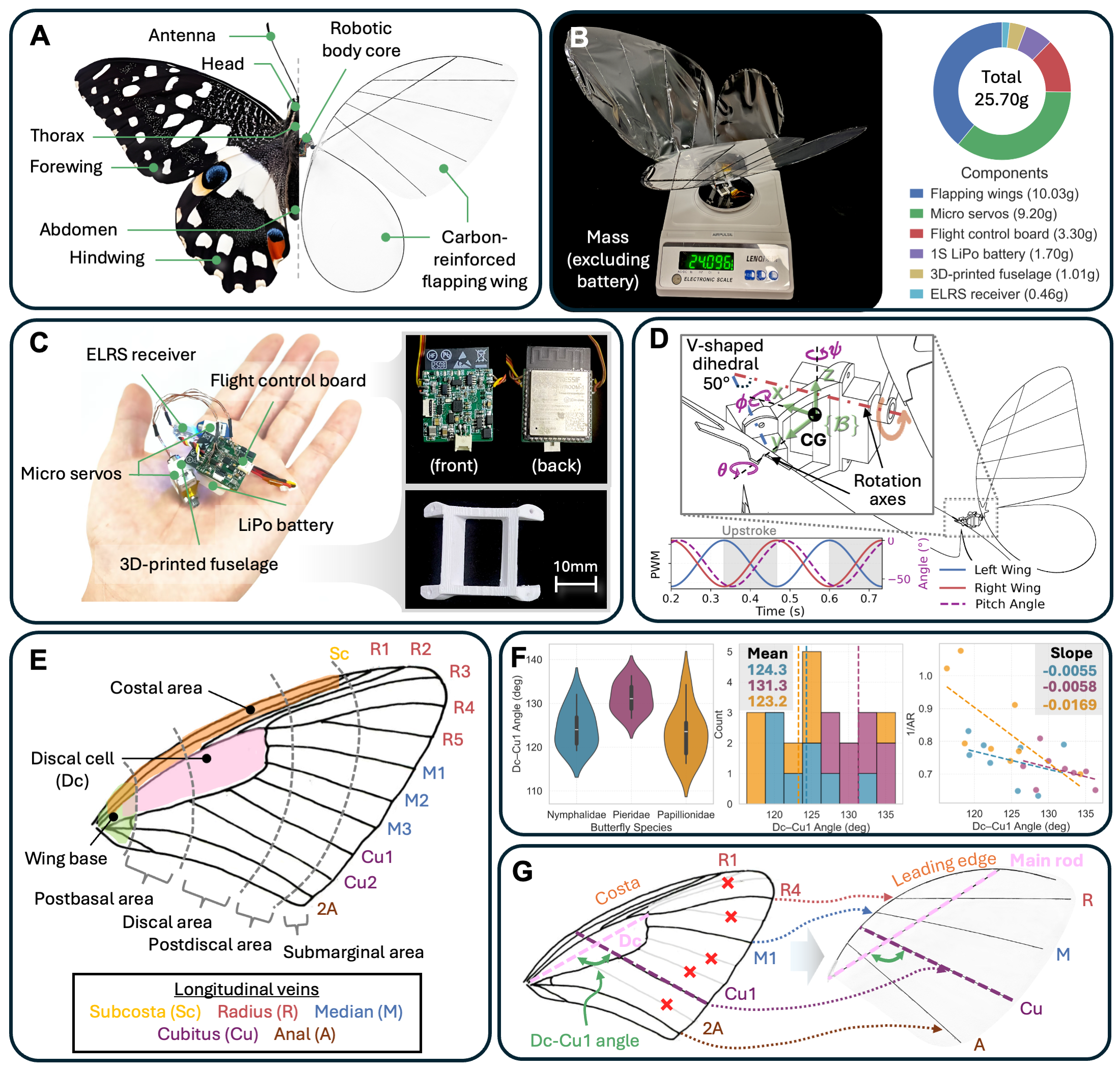
- It's not the best, but there's a photo of the butterfly in Figure 1(B) on page 20.
On a separate note, if you're looking for something more explicit, there are some suggestive violin plots in item F in the same figure, ironically with the caption even saying "Nymphalidae" (here referring to the family of butterflies, but "nymph" is also a general anatomical term/prefix for female genitals, or particularly the inner labia or clitoris).
- * https://arxiv.org/html/2602.06811v1/figure/SciRob_Fig1_Biomi...
* https://arxiv.org/html/2602.06811v1/figure/SciRob_Fig2_Chara...
* https://arxiv.org/html/2602.06811v1/figure/SciRob_Fig7_Discu...
- Fig 1 showing the weight broken down by components is interesting. I would have expected the battery to be a larger percentage of the weight.
- Gotta love how their flight control board is the same size and mounted to the back of the ESP32 module.
Edit: It references ELRS but I don't see one of the standard Lora tower antennas used in the smallest commercial modules. They also often use an unshielded esp32 Soc instead of the full module.
The onboard embedded system is based on an ESP32-S3-WROOM-1-N16R8 (dual-core 32- bit Xtensa LX7, 240 MHz, 16 MB Flash, 8 MB PSRAM), supporting parallel real-time wing actuation and wireless communication with a custom ground control station for data logging and monitoring. . . . and an LDO outputs 5 V to the ExpressLRSmodule. The ELRS module serves only as a safety override for manual control.
- Nor a video. So many words though.
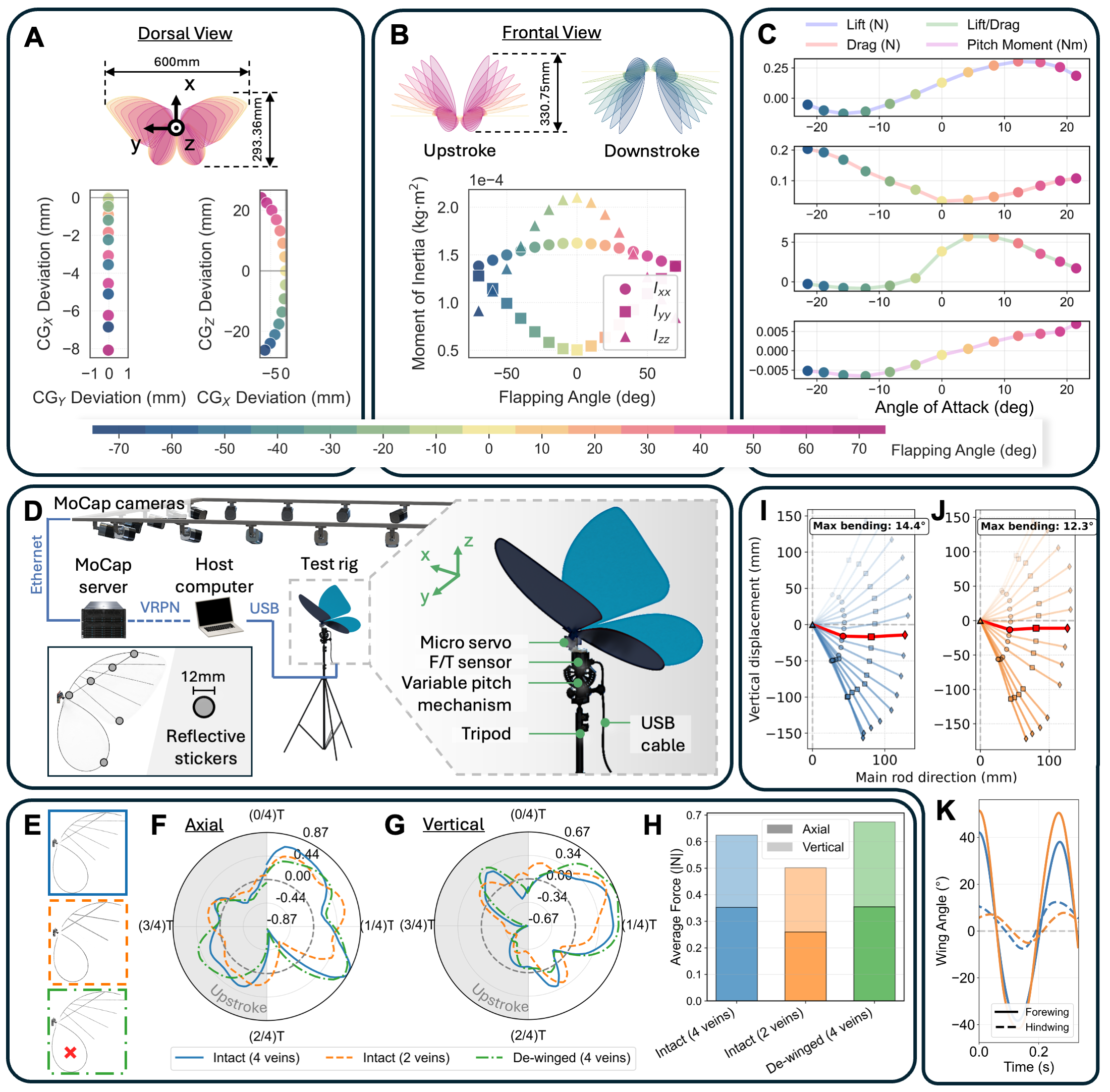
- If anyone is clicking but noping out of a white paper, deep in the paper are remarkably wonderful charts explaining what's going on to pull this off.
- "Their non-invasive maneuverability is ideally suited for real-world applications, such as confined-space inspection and ecological monitoring, inaccessible to traditional drones"
I'm having a hard time imagining a situation where flapping wings would be superior to a rotary winged drone. Anyone have any insight?
- I wish there were a video of this linked from the research paper.
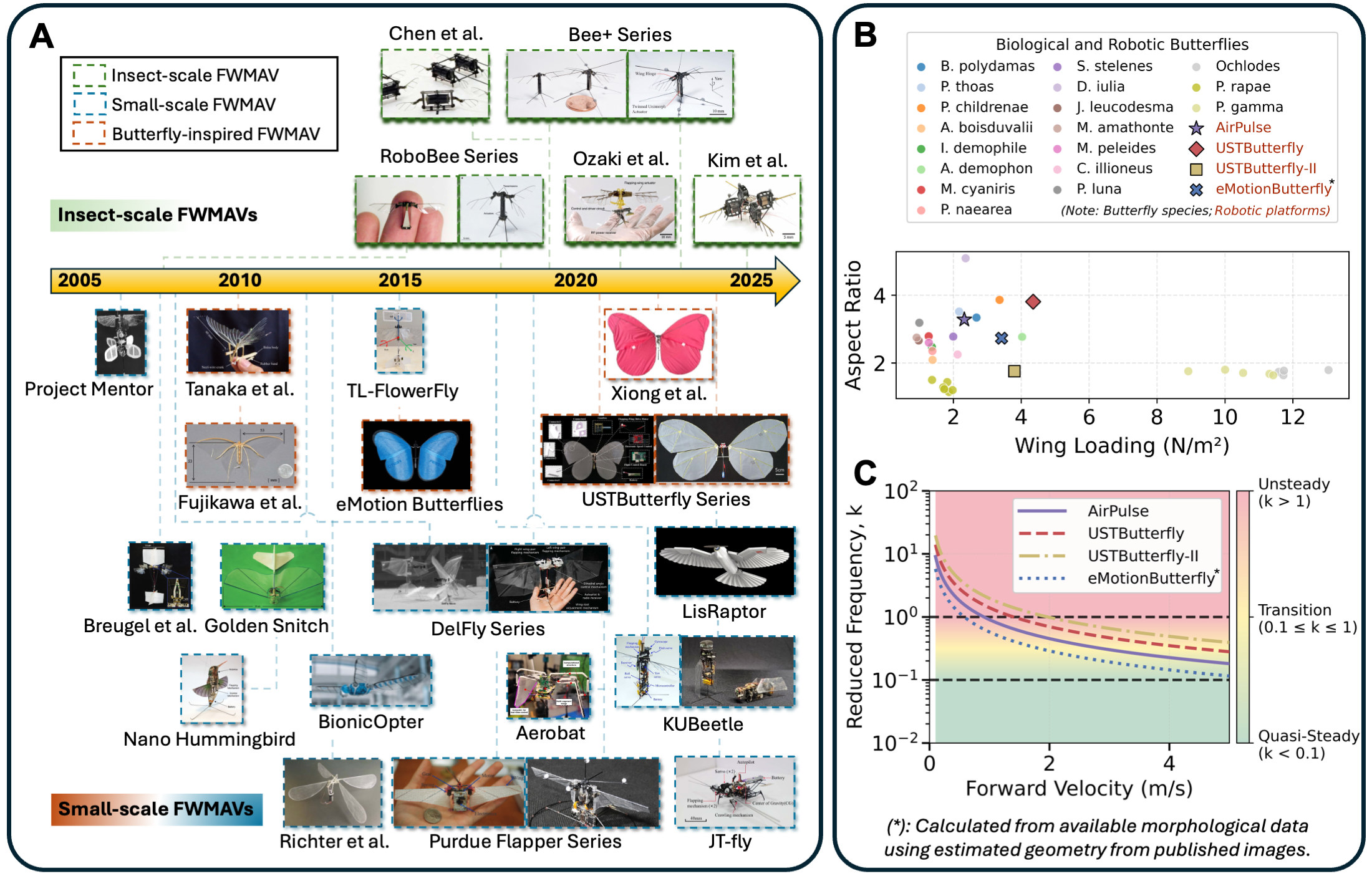
- Here is the “eMotionButterfly” their charts show beat them in flight characteristics, but is 3x the weight and more of a dragonfly body than butterfly body:
- Wow, very cool video... and from 2015!
- https://en.wikipedia.org/wiki/Danny_Dunn%2C_Invisible_Boy - leaving the realm of science fiction at long last.
- Feels like the future is here at last. First we get Asimov's Bard (https://nyc3.digitaloceanspaces.com/sffaudio-usa/mp3s/Someda... ), now Professor Bullfinch's Isit.
Oh, and General Gruntle from the second story is cutting deals left and right with the labs that brought us the first.
63 points by Terretta 4 days ago | 17 comments
{kind=link}
{kind=link}
{kind=link}
{kind=link}